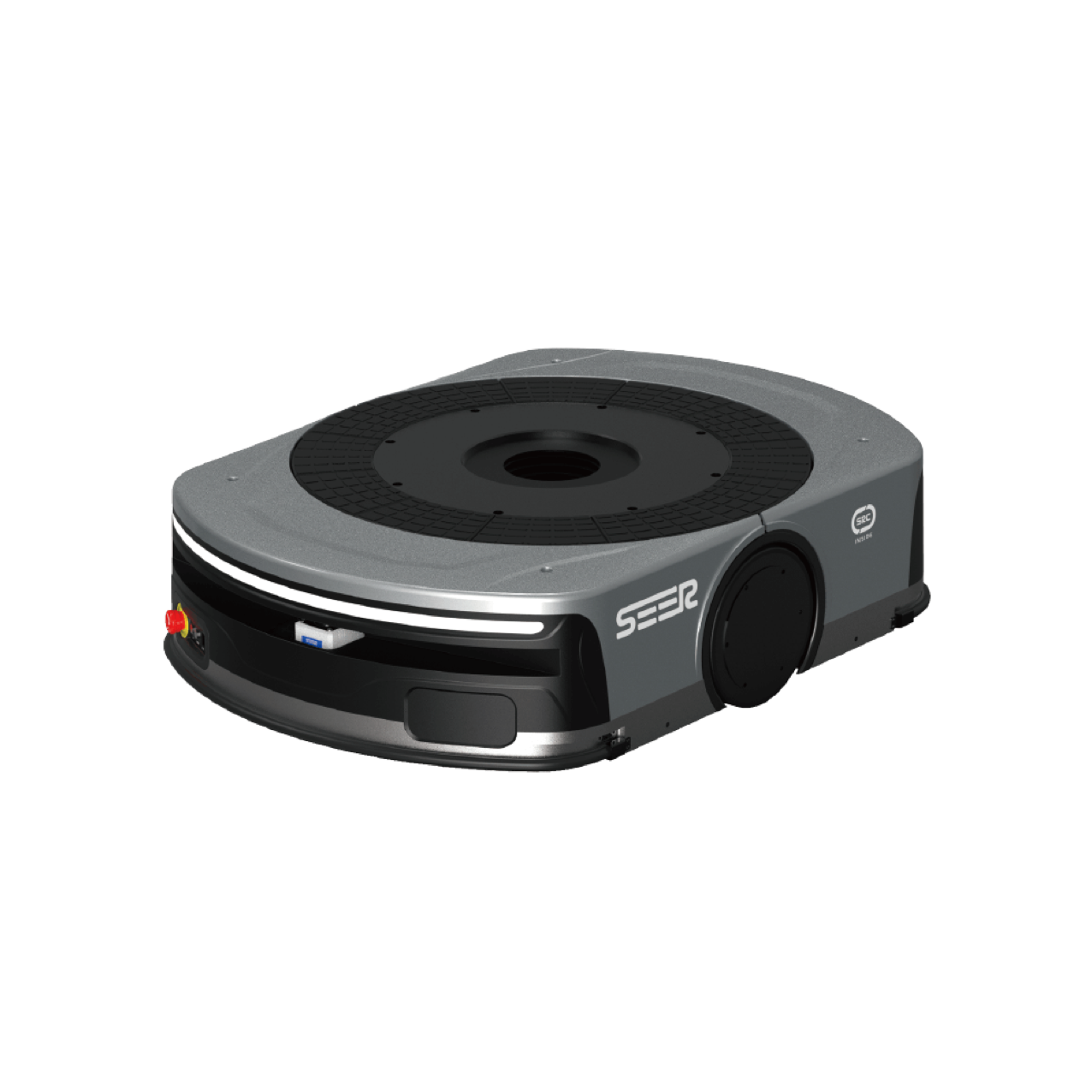
LEVROBOTOJ – Rotacia Levo-Roboto AMB-800K

Ĉefa Kategorio
AGV AMR / levleva AGV AMR / AGV aŭtomate gvidita veturilo / AMR aŭtonoma movebla roboto / AGV AMR-aŭto por industria materialmanipulado / Ĉinia fabrikanto AGV-roboto / stokejo AMR / AMR levleva lasero SLAM-navigado / AGV AMR movebla roboto / AGV AMR ĉasio lasero SLAM-navigado / inteligenta loĝistika roboto
Apliko

AMB-serio Senpilota Ĉasio AMB (Aŭtomobila Bazo) por aŭtonomaj veturiloj AGV, universala ĉasio desegnita por aŭtonomaj gvidataj veturiloj AGV, provizas kelkajn funkciojn kiel mapredaktado kaj lokaliza navigado. Ĉi tiu senpilota ĉasio por AGV-ĉaro provizas abundajn interfacojn kiel I/O kaj CAN por munti diversajn suprajn modulojn kune kun potenca klienta programaro kaj ekspedsistemoj por helpi uzantojn rapide kompletigi la fabrikadon kaj aplikon de aŭtonomaj veturiloj AGV. Estas kvar muntaj truoj sur la supro de la AMB-serio senpilota ĉasio por aŭtonomaj gvidataj veturiloj AGV, kiu subtenas arbitran vastiĝon per levado, rulpremiloj, manipuliloj, latenta tirado, ekrano, ktp. por atingi plurajn aplikojn de unu ĉasio. AMB kune kun SEER Enterprise Enhanced Digitalization povas realigi la unuecan ekspedadon kaj deplojon de centoj da AMB-produktoj samtempe, kio multe plibonigas la inteligentan nivelon de interna loĝistiko kaj transportado en la fabriko.
Trajto
· Taksa ŝarĝo: 800 kg
· Daŭro: 8 horoj
· Lidar-numero: 1
· Rotacia Diametro: 980mm
· Navigacia Rapido: ≤1.8m/s
· Poziciiga Precizeco: ±5, ±0.5mm
● Pli maldika korpo por pli breto-portantaj scenaroj
Ĝi estas nur 245 mm alta por pli da bretoportaj scenaroj.
● 360° Rotacio, Fleksebla por Preno, Depono kaj Portado
La stirado de la robotkorpo kaj la levitaj varoj povas esti kontrolataj por facile pritrakti mallarĝajn spacojn, areojn kun densaj bretoj kaj tiel plu.
Navigada precizeco povas atingi ±5 mm. Subtenas plurajn navigadajn metodojn, kiel SLAM, QR-kodon kaj reflektoran navigadon, por plenumi diversajn postulojn en malsamaj scenaroj.
● Ŝarĝkapacito de 800 kg por facila portado
Ŝarĝkapacito de 800 kg por porti ŝarĝojn en diversaj scenaroj, inkluzive de e-komerca plukado, materialtransigo, telefona liverado kaj aliaj produktadoj.
● Kurrapideco de 2,2 m/s, Pli Rapida kaj Pli Efika
Plena ŝarĝo kun maksimuma kurrapideco de 1,8 m/s kaj sen ŝarĝo kun maksimuma kurrapideco de 2,2 m/s. Rapida preno/depono de varoj en 2,5±0,5 s.



Specifa Parametro
| Produkta nomo | AMB-300JZ | AMB-JS | AMB-800K | |
| asicparametroj | Navigada metodo | Lasera ŜLEMO | Lasera ŜLEMO | Lasera ŜLEMO |
| Veturreĝimo | Du-rada diferencialo | Du-rada diferencialo | Du-rada diferencialo | |
| Ŝelkoloro | Malvarmeta Griza | Malvarmeta Griza | Nigra kaj griza | |
| L*W*H (mm) | 792*580*250 | 1330*952*290 | 980*680*245 | |
| Rotacia diametro (mm) | 910 | 1460 | 980 | |
| Pezo (kun baterio) (kg) | 150 | 265 | 150 | |
| Ŝarĝkapacito (kg) | 300 | 500/1000 | 800 | |
| Dimensioj de la levplatformo (mm) | 760*545 | 1300*920 | φ640 | |
| Maksimuma alteco de levado (mm) | 60±2 | 60±1 | 60±2 | |
| Elfaro parametroj | Minimuma veturebla larĝo (mm) | 640 | 1050 | 820 |
| Precizeco de navigacia pozicio (mm)* | ±5 | ±5 | ±5 | |
| Navigacia angula precizeco (°)* | ±0.5 | ±1 | ±0.5 | |
| Navigacia rapido (m/s) | ≤1.5 | ≤1.5 | ≤1.8 | |
| Baterioparametroj | Bateriospecifoj (V/Ah) | 48/20 (Litio-Fera Fosfato) | 48/40 (Litio-Fera Fosfato) | 48/27 (Litio-Fera Fosfato) |
| Ampleksa bateria vivo (h) | 8 | 7 | 8 | |
| Aŭtomataj ŝargaj parametroj (V/A) | 54.6/15 | 54.6/40 | 54.5/15 | |
| Ŝarga tempo (10-80%) (h) | ≤1 | ≤2 | ≤2 | |
| Ŝarga metodo | Mana/Aŭtomata | Mana/Aŭtomata | Mana/Aŭtomata | |
| Konfiguracioj | Lidar-nombro | 2 (SICK nanoScan3 + SENPAGA C2) aŭ 2 (SENPAGA H1 + SENPAGA C2) | 2(SICK nanoScan3) | 1 (SICK nanoScan3 Core) aŭ 1 (OLEILR-1BS5H) |
| Nombro de malalt-poziciaj obstaklo-evitaj fotoelektraj | 0 | - | 0 | |
| Kargodetekto | - | 〇 | - | |
| Butono de haltigo de kriz-okazo | ● | ● | ● | |
| Parolanto | ● | ● | ● | |
| Atmosfera lumo | ● | ● | ● | |
| Bufrostrio | ● | ● | ● | |
| Funkcioj | Wi-Fi-vagado | ● | ● | ● |
| Aŭtomata ŝargado | ● | ● | ● | |
| Bretrekono | ● | ● | ● | |
| Spino | - | - | ● | |
| Preciza loko per QR-kodo | 〇 | - | 〇 | |
| Navigado per QR-kodoj | 〇 | - | 〇 | |
| Navigado per lasera reflektoro | 〇 | 〇 | 〇 | |
| Atestiloj | EMC/ESD | - | ● | - |
| UN38.3 | - | ● | ● | |
* Navigada precizeco kutime rilatas al la ripetebla precizeco, kiun roboto navigas al la stacio.
● Norma 〇 Laŭvola Neniu
Nia Komerco







